Contact Mode versus Tapping Mode AFM
The goal of this application note is to give a short comparison between the two most commonly used basic regimes of AFM operation: tapping and contact mode. Below, descriptions are given for both modes in parallel.
So what mode should you use? What mode is better? There is no general answer to those questions, but hopefully this comparison will help you determine the right mode of operation for your specific application
 VS
VS 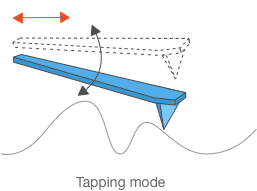
| CONTACT MODE | TAPPING MODE | |
|---|---|---|
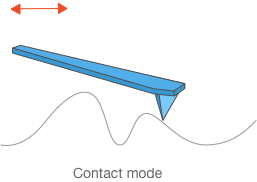
| AFM tip movement | The AFM tip is in constant contact with the sample surface during scanning. | The AFM cantilever is oscillated at or near its resonance frequency by a piezoelectric actuator. The AFM tip touches the surface at the lower end of its vertical movement.
|
| AFM cantilever | Long AFM cantilevers with low force constants and low resonance frequencies are used for better sensitivity.
|
Short AFM cantilevers with high force constants and high resonance frequencies are used to avoid sticking.
|
| Feedback control | While the AFM tip tracks the scanned surface, the optical feedback loop controls and maintains constant AFM cantilever deflection. | While the AFM tip tracks the surface, the optical feedback loop controls and maintains constant AFM cantilever oscillation amplitude. |
| Tip-surface interaction | Constant AFM cantilever deflection is equivalent to a constant interaction force between the AFM tip and the sample surface. Interaction force: x1nN-x100nN |
Constant AFM cantilever oscillation damping is equivalent to a constant interaction force between the AFM tip and the sample surface. |
| Samples | Best results are achieved on hard sample surfaces without sharp edges or tall steep features. The AFM tip can move loosely attached objects. | Scans are possible on different types of surfaces, including soft samples and samples with loosely attached objects. |
| Interaction with surface contaminants | When measuring in ambient air, adhesion to the surface water layer is a common problem that results in image distortions. Measuring in liquids or in ultra high vacuum (UHV) helps avoid surface contamination for samples that allow such conditions. | Tip-surface adhesion is usually not a problem because the stiff AFM cantilevers used have enough energy at the contact point to overcome the attractive forces. |
| AFM tip and sample surface wear and damage | The vertical and lateral interaction with the surface is not negligible regarding material abrasion from both the AFM tip and the sample surface. Frictional forces cause higher AFM tip wear and surface damage compared to tapping mode. | Lower interaction forces, the AFM tip touches the sample surface at the very end of its travel. Lateral friction forces are negligible. |
| Ease of use | There are fewer parameters to set and control. Contact mode AFM is more suitable for beginners than tapping mode. | There are additional parameters to control connected to the AFM cantilever’s oscillatory motion. |
| Additional advantages | Lateral friction forces can be detected when measuring in constant contact with the sample surface. Additionally, certain extended measurement modes such as Conductive-AFM (C-AFM), Tunneling Current AFM (TUNA), Scanning Spreading Resistance Microscopy (SSRM) are only possible in contact mode. | Phase imaging can be performed in tapping mode. Certain extended measurement modes are only possible in tapping mode: Electrostatic Force Microscopy (EFM), Magnetic Force Microscopy (MFM), Scanning capacitance microscopy (SCM), etc. |